前言
这篇文章主要是记录如何搭建一个能够运行深度学习库mxnet的python环境,需要说明的是,我是在阿里云云服务器的远程主机上安装的,系统为Ubuntu1604,不过后面我也在我自己的Win10的本地主机上安装了一次,由于conda本身是夸平台的所以安装的流程都差不多。
搭建环境
1. 安装minicoda
为了保持python环境的纯净性,我们将为mxnet专门创建一个新的python环境,使用conda来管理系统中多环境,所以安装miniconda和anaconda都是可以的。鉴于我的python环境是会重新安装的,所以我这里安装更加小巧的miniconda。
终端中执行如下命令下载miniconda,当然如果有图形界面用浏览器下载也是一样的(唯一需要注意的是选择你系统对应的版本和机器的位宽,我是Ubuntu系统 64bit的机器,自然是选择Linux 64bit版本):
1 | wget -c http://repo.continuum.io/miniconda/Miniconda-latest-Linux-x86_64.sh |
上面是miniconda官方的下载地址,国内速度比蜗牛还慢,简直不能忍,于是切换为国内清华提供的下载源:
1 | wget -c https://mirrors.tuna.tsinghua.edu.cn/anaconda/miniconda/Miniconda3-latest-Linux-x86_64.sh |
下载完整后安装操作就简单了:
1 | chmod +x Miniconda-latest-Linux-x86_64.sh |
2. 安装mxnet的python环境
nxnet作为一个深度学习框架,是需要不少其他python库支持的,当前最重要的就是Numpy了。而conda是提供复制别人的环境的,所以从下载官方向导文件中提供的环境配置文件:
1 | git clone https://github.com/mli/gluon-tuto rials-zh |
当然这命令的前提是,装好了git,git安装简单就不讲了。在下载的文件夹中的environment.yml就是我们所需要的文件,使用conda复制创建一个mxnet的python环境:
1 | conda env create -f environment.yml |
等待一些列库的安装完成就可以了,在environment.yml文件中,将环境名命名为gluon,所以后面需要使用gluon进入该环境,关于用conda来切换管理多python环境我之间有总结过,这里就不讲了。
3. 为jupyter notebook配置其远程服务
jupyter notebook是官方推荐的开发环境,在复制创建的gluon中已经安装好了,由于我是在远程主机上安装的环境,所以我现在需要为jupyter notebook配置远程服务,操作如下:
首先,生成jupyter notebook的配置文件jupyter_notebook_config.py:
1 | jupyter notebook --generate-config |
然后打开jupyter_notebook_config.py:
1 | vim ~/.jupyter/jupyter_notebook_config.py |
修改配置如下:
1 | c.NotebookApp.ip='*' |
修改完成后保存,打开jupyter notebook,root用户打开需要加以下选项:
1 | jupyter notebook --allow-root |
至此jupyter notebook远程服务器部分操作完成,我们可以从本地机的浏览器中输入登陆远程服务器的jupyter的地址就可以登陆:IP:PORT。
不过很多时候由于防火墙的阻挡这样是不能正常连接jupyter的,对此最好的解决方法是在本地机上建立ssh通道访问jupyter,如果本地机是Linux系统那么只需要一条命令即可:
1 | ssh -L8888:lcalhost:4562 远程主机登陆用户@远程主机IP |
这样就可以将远程的8888jupyter端口映射到本地的4562端口上来,在浏览器中输入:localhost:4562,即可连接到远程的jupyter notebook。
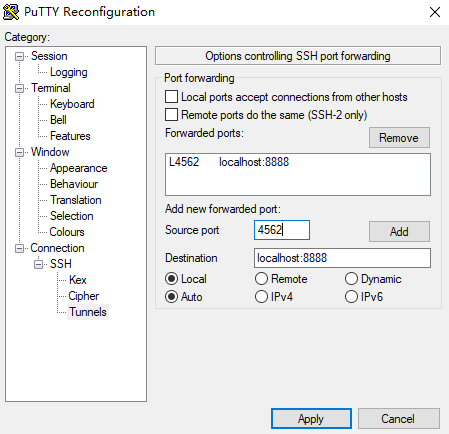
对于本地机是Windows的用户,可能就要使用工具来建立ssh端口映射了,我是用的putty,设置Connection->SSH->Tunnels,添加从本地端口到远端端口的通道,然后通过SSH登录到服务器,截图如下:
最后在浏览器中设置代理,建议最好用火狐,可以设置仅限于火狐自身的局部代理,而不会影响全局的上网功能,截图如下(不过我后面发现,其实是不需要设置浏览器代理的):

4. 配置jupyter notebook的markdown文件读写功能
使用过jupyter notebook的人都知道,jupyter notebook的默认工作文件格式为.ipynb,我们希望将其切换为markdown格式(因为mxnet的gluon向导全部使用md文件),所以需要安装notedown插件:
1 | pip install notedown |
说实话,notedown这个插件,不是很好装,我在gluon环境中没有安装上,退出了gluon环境后用pip装好的,很奇怪。安装好以后,再次修改配置文件jupyter_notebook_config.py如下:
1 | c.NotebookApp.contents_manager_class = 'notedown.NotedownContentsManager' |
5. 导入mxnet出错
我进入gluon环境,在python代码中导入mxnet,如果出现以下错入:
1 | libgfortran.so.3: cannot open shared object file: No such file or directory |
说明系统中缺少libgfortran库,直接使用apt-get安装即可:
32 bit系统
1 | sudo apt-get install libgfortran |
64 bit系统
1 | sudo apt-get install gfortran-multilib |
测试端口是否打开
可能在连接远程jupyter notebook服务时会遇到其他一些问题,检查网络端口的情况会给调试很大的帮助,所以这里再补充说明下测试网络端口的问题,在Linux下测试网络端口的方法很多,我这里使用netcat(简称 nc)工具来检查。首先安装(以Ubuntu为例):
sudo apt-get install netcat
测试主机端口是否打开命令如下:
nc -zv [IP] [port]
上面的命令中,这些标志是:
- z 设置 nc 只是扫描侦听守护进程,实际上不向它们发送任何数据。
- v 启用详细模式